Lifelong Autonomy through Adaptation
Robots are becoming an important part of our daily lives. They will be performing dangerous tasks, such as disaster response and infrastructure inspection; assisting in factories, hospitals, and homes; and exploring on land, in the air, under water, and in space. In order for this vision of robotics to actually materialize, it is essential that robots must be able to operate over long periods of time (e.g., across seasons) without human supervision -- essentially, "lifelong autonomy." Being capable of adaptation over their lifetimes is necessary for lifelong robots to continue operating effectively and autonomously.
Lifelong Autonomy Demonstrations
Examples of Ongoing Projects
-
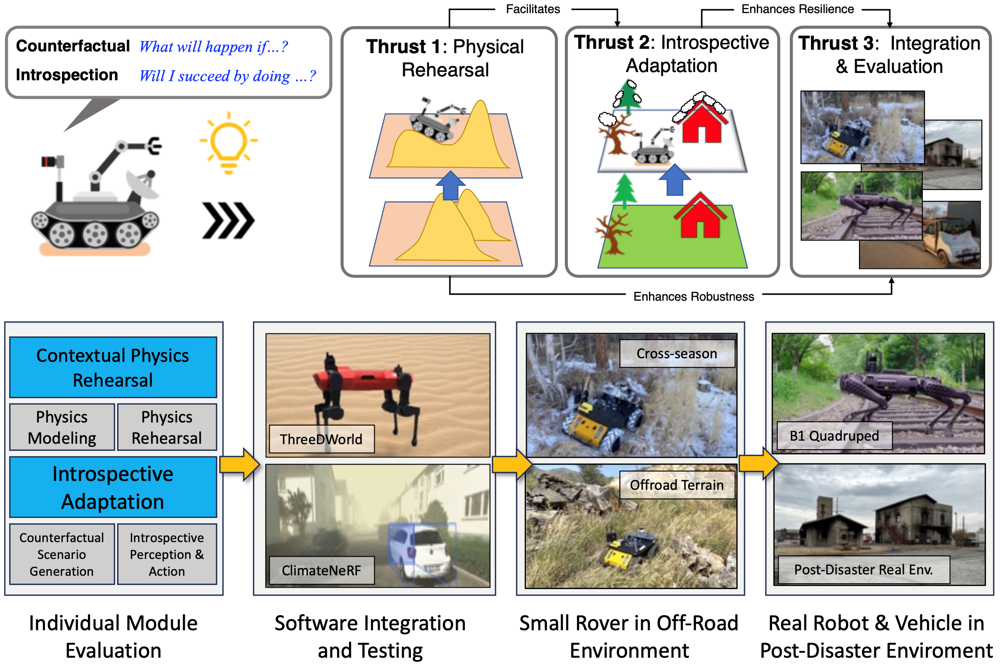
Introspective Counterfactual Reasoning for Robust and Resilient Autonomy
Sponsor: National Science Foundation
Resilience and robustness in dynamic, unpredictable environments are critical concerns for autonomous systems in robotics. To address this, the project introduces "introspective counterfactual reasoning," enabling lifelong autonomy for robots. While counterfactual thinking is vital for humans, its application in robotics is underexplored. This project aims to close this gap by helping robots answer "what if" questions about their surroundings and themselves, enhancing their readiness for unforeseen events and evolving contexts. The project develops two forms of counterfactual reasoning: Contextual Physical Rehearsal and Introspection Adaptation. Contextual Physical Rehearsal lets robots model the physical world and predict action outcomes without actual execution. Introspection Adaptation focuses on improving robots' ability to perform in unfamiliar environments. These capabilities will be designed, integrated into autonomy platforms, and validated in real-world tasks.
[Award Abstract]
Collaborative Robotics and Teaming
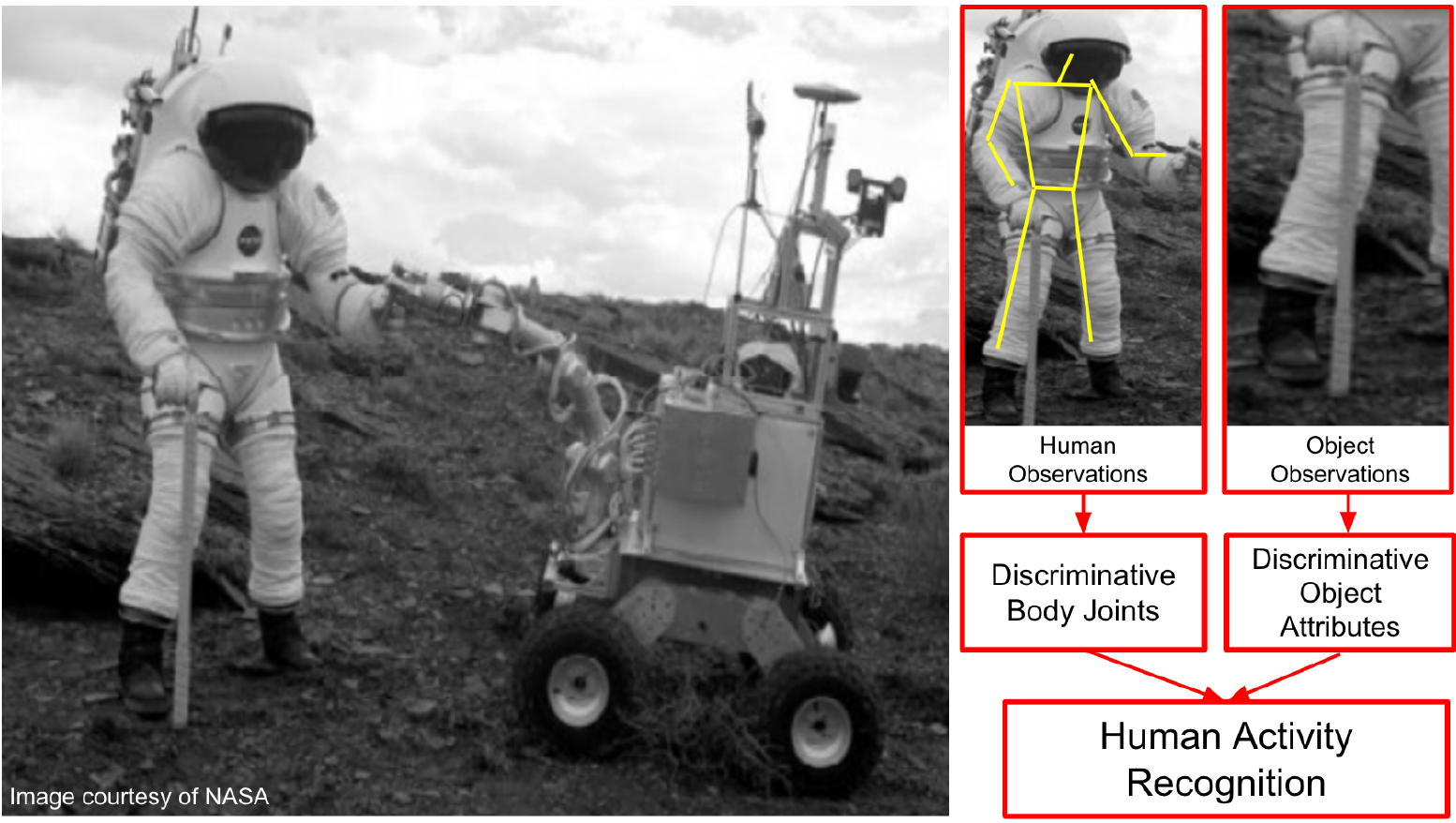
We envision that robots/swarms and humans team up and collaboratively work together side-by-side in the same physical space, with an interaction style that is not based on direct controls and commands from humans to robots, but rather on the idea that robots can implicitly infer human intents and behaviors through passive observation. This would allow a person to collaborate with robots in a natural manner, as he/she would when teaming with human teammates, thus bypassing the difficulty of cognitive overload that occurs when humans are required to explicitly supervise robot teammates.
Collaborative Robotics Demonstrations
Examples of Ongoing Projects
-
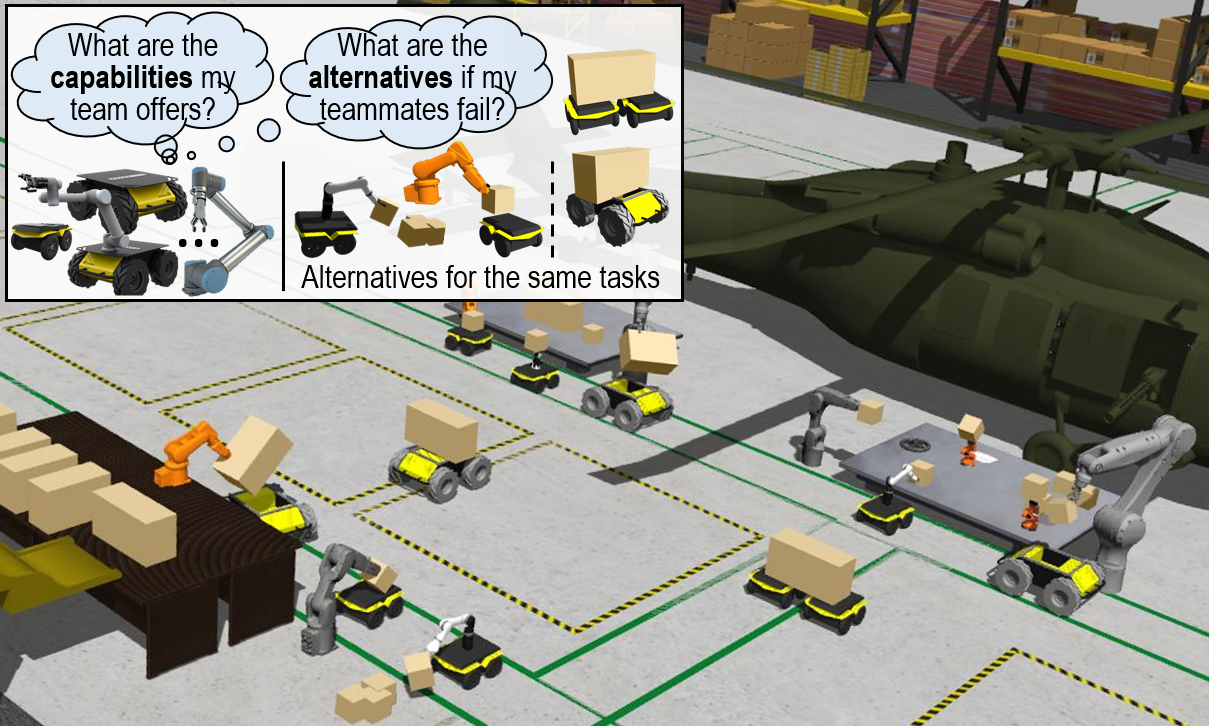
DARPA Young Faculty Award (YFA) and DARPA Director's Fellowship: Autonomous Group Introspective Learning and coopEtition (AGILE) for Cross-Capability Multi-Robot Adaptation
Sponsor: Defense Advanced Research Projects Agency
This project offers Autonomous Group Introspective Learning and coopEtition (AGILE) to revolutionize cross-capability multi-robot adaptation to complex failures in manufacturing applications. Inspired by social psychology of humans, this project develops AGILE to uniquely innovate team adaptability. AGILE enables team adaptation by group introspection and by coopetition (i.e., collaborative competition). If successful, AGILE will be an essential step towards creating robust robot teams that adapt to failures at a near human-level. Project success will also revolutionize multi-robot manufacturing in terms of improved robustness to failures and increased throughput and agility of assembly cells. Beyond manufacturing, AGILE has broader multi-robot applications, from transportation to reconnaissance and to disaster response, where heterogeneous robots with diverse capabilities carry out complex tasks in unstructured environments.
[UMass News]
-
Context-Aware Ethical Autonomy for Language Capable Robots
Sponsor: National Science Foundation
This project will develop an intelligent robot capable of performing ethical reasoning using a dynamic set of norms that change along with the robot's context, using these reasoning capabilities to intelligently reject or offer alternatives to inappropriate commands, and learning rich representations of the contexts relevant to its set of moral and social norms. These capabilities are crucial as robots move into the real world, in which they may be given unethical commands, either due to malfeasance or ignorance, may be required to operate in not one context, but a variety of contexts, each which may have their own relevant social and moral norms, and may need to learn about new contexts from both human instruction and their own perception.
[Award Abstract]
HCRL Robots


Sponsors
Our research and educational activities have been supported by National Science Foundation (NSF), Defense Advanced Research Projects Agency (DARPA), Army Research Laboratory (ARL), Office of Naval Research (ONR), Department of Energy (DOE), Department of Transportation (DOT), Alpha Foundation, Army Research Office (ARO), United States Air Force Academy (USAFA), Toyota Motor North America, DCP Midstream, and Metcalf Archaeological Consultants, Inc.